
Description
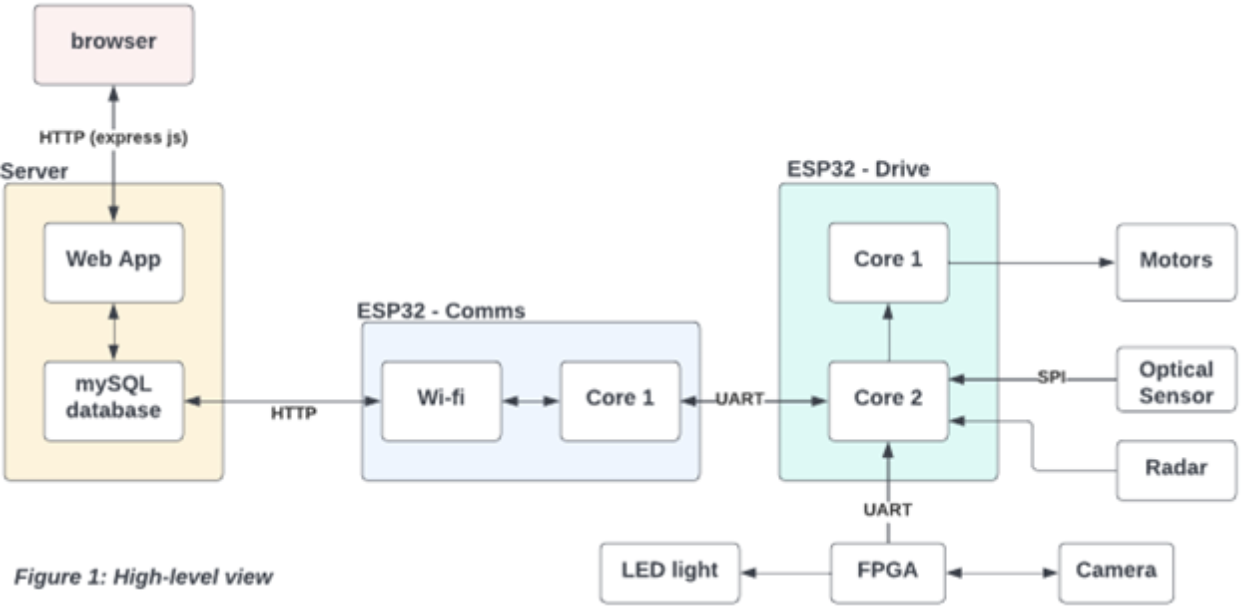
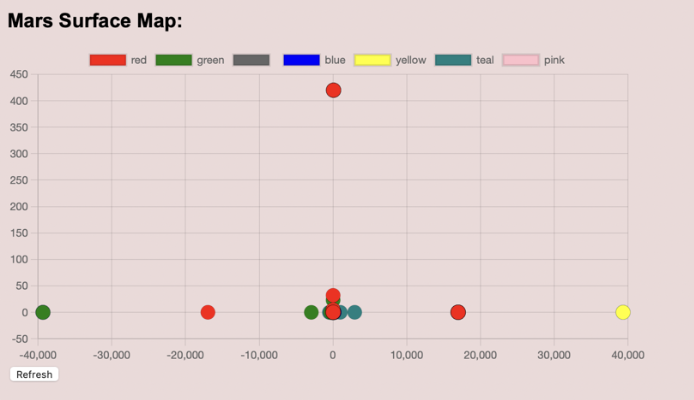
The end of year group project for my second year of University. The objective of this project was to build a Autonomous rover capable of navigating an unknown environment, identify specific objects and locate them on a map - all while not crashing.
Details
| Skills: | Concurrent Programming Embedded Systems C++ Feedback Control |
| Scope: | University |
| Date: | July 2022 |
Responsibilities
This project was done in groups of 7, with each member working on one of the different subsystems. I was in charge of the Rover's hardware, the Control system and the combination of the different subsystems.
- Designed a PID Controller based on data from a Gyroscope and Optical Flow Sensor, resulting in millimeter controllable precision over even large periods of time.
- Implemented UART Serial Connectivity between the core ESP32s of the mars rover as well as between the rover and the FPGA based vision system.